Ce projet a été réalisé durant une matière à l'Université de Technologie de Troyes. Le but est de concevoir et programmer un robot holonome afin de le faire réaliser des mouvements choisis et prédéfinis.

Le projet n'avait pas de réel but au départ. Des objectifs ont été imaginés en début de semestre. De nombreux points ont donc été abordés pour essayer de satisfaire les différents buts :
- Maitriser les capteurs déjà présents
- Choisir une trajectoire
- Gérer les obstacles
- Installer une communication par Bluetooth
- Trouver une utilité au système
Ci-dessous, le robot lors du début du semestre (à gauche) et à la fin du semestre (à droite)
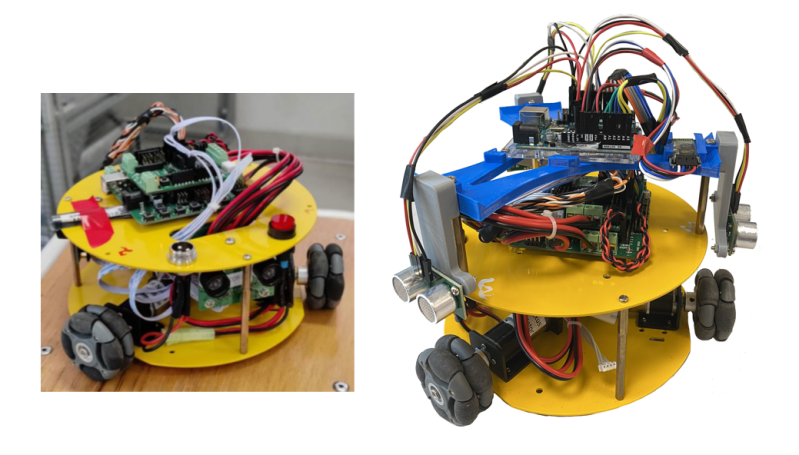
Le robot peut désormais être commandé sur téléphone Android grâce à une communication bluetooth et il évite des obstacles.
Le rapport de projet est disponible ci-dessous :
Ajouter un commentaire
Commentaires